【计算机视觉】如何用传统方法在实现目标检测?
问题描述
深度学习虽然很火热,但是数据量不大的时候,深度学习的性能还是比较差的,最主要的是模型能力太强,学出来之后不能泛化,因此一种可选的方法就是 不要处处都是深度模型,试试返璞归真的传统方法。
传统方法
基本上传统机器方法最直观的就是分类、回归,而对于计算机视觉中级任务:目标检测 该如何下手呢?一种最直观的想法就是用滑动窗口 sliding window 的方法,对滑动窗口内的图像块儿进行分类,根据滑动窗口的位置得到检测结果。那么对于深度模型,常常是端到端的,采用 CNN 进行 深度特征的提取,R-CNN系列则采用 Selective Search、Region Proposal Network作为候选样本的进行采集,同时加上了位置的回归,深度模型剩余的部分实际上也是进行的分类。整个解决思路并没有太大的冲突。
所以,传统方法解决方案包括三个步骤,一是选择合适的图像块儿 image patch 特征描述子,二是选择合适的分类器,三是用提取的特征及提供的标签对分类器进行训练。
下面我主要按照三个步骤的描述进行介绍:
图像块儿 image patch 特征描述子
直接采用 Raw Features 即RGB像素 进行重排,构成一维度的特征矢量,这样的方法太朴素,没有发挥传统方法中精妙的手工特征设计的优势,所以,这里不对这些比较朴素的特征进行介绍。
什么是特征描述子 feature descriptor?
这里面介绍的非常到位: https://www.analyticsvidhya.com/blog/2019/09/feature-engineering-images-introduction-hog-feature-descriptor/
摘录一二:
-
特征描述子做了什么:
It is a simplified representation of the image that contains only the most important information about the image. -
最常用的特征描述子:
HOG: Histogram of Oriented Gradients SIFT: Scale Invariant Feature Transform SURF: Speeded-Up Robust Feature
方向梯度直方图 Histogram of Oriented Gradients(HOG)
-
HOG描述子聚焦的是目标的结构或者形状,与单纯的判断像素是否属于边缘edge不同,HOG能够通过抽取边缘的梯度和方向(或者幅度和方向)来提供边缘的方向;
-
这些
orientation是在局部提取去的,这意味着需要将完整的图像打碎成更小的区域,对每个区域进行梯度和方向的计算; -
最后会对每个这些区域单独计算一个像素值的梯度和方向的直方图,故而被称之为方向梯度直方图 HOG。
The HOG feature descriptor counts the occurrences of gradient orientation in localized portions of an image.
直观感受
先直观看一下对应MATLAB版本的HOG提取方法及可视化结果:
img = imread('cameraman.tif');
[featureVector,hogVisualization] = extractHOGFeatures(img);
figure;
imshow(img);
hold on;
plot(hogVisualization);
计算过程
第一步:计算x,y方向梯度
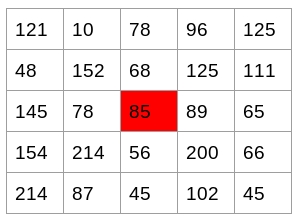
类似用sobel算子进行的梯度计算:

Change in X direction(Gx) = 89 – 78 = 11
Change in Y direction(Gy) = 68 – 56 = 8
第二步:计算梯度的幅度和方向
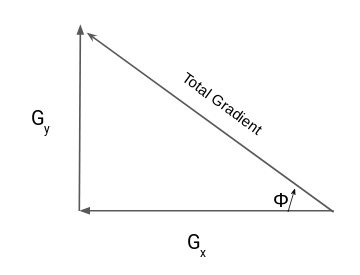
Total Gradient Magnitude = √[(Gx)2+(Gy)2] ==> Total Gradient Magnitude = √[(11)2+(8)2] = 13.6
tan(Φ) = Gy / Gx ==> Φ = atan(Gy / Gx)
对每个像素都这样计算梯度的方向和幅度。
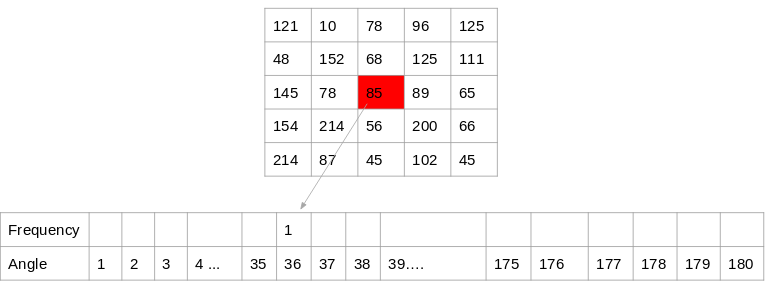
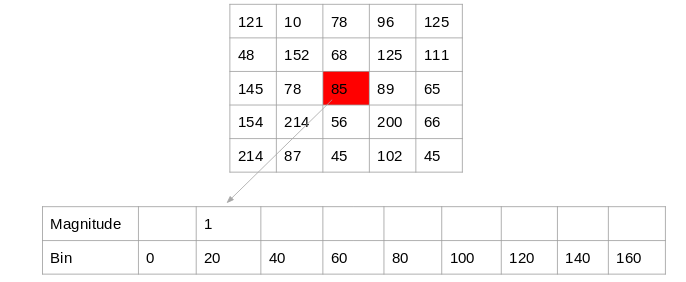
第三步:计算梯度的直方图
####### 几种利用梯度幅度和方向计算直方图的方法
方法一:以梯度方向从1-180°,bin=1:
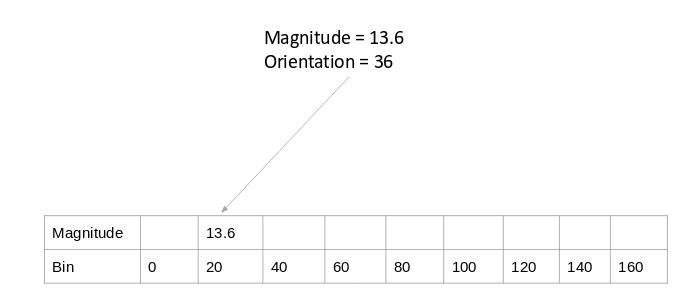
方法二:以梯度方向,bin=20
方法三:上面两种均没有将梯度值考虑在内,这次不去统计梯度方向的次数,而是将对应方向的梯度值加进去
方法四:在方法三的基础上,考虑到一个梯度方向可能刚好跨进两边,那么就计算一个根据距离的加权的幅度值:
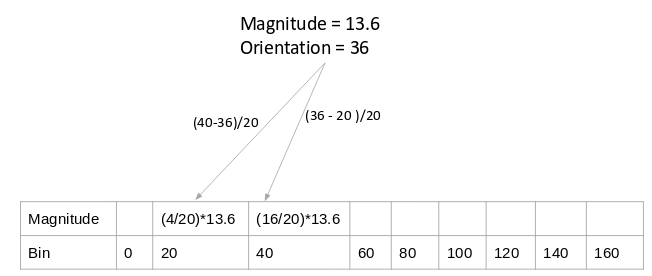
这就是HOG特征描述子如何计算梯度方向直方图的。
####### 在8x8的cells内计算9x1的梯度直方图
梯度直方图不是在整幅图像上计算的,而是先把图像分解为8x8的cells,然后带方向的梯度的直方图分别在每个cell中进行统计。
第四步:在16x16的cell中归一化梯度
因为图像的梯度对于 overall lighting 十分敏感,图像中的一些部分与其它部分相比会比较明亮。虽然不能完全消除这种影响,但是能够通过归一化梯度减少光照变化的影响。然后以16x16的大小为block来进行。
所以一个block中有4个cells,从而构成了36x1的直方图。进行归一化即可。
第五步:构建完整图像的特征
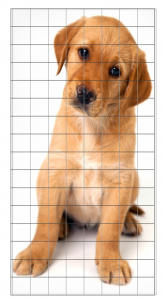
将所有的blocks合并在一起构成了整幅图像的梯度直方图。以上面64x128的图像为例,共分成了7x15=105个block,那么105x36x1=3780个features。
from skimage.feature import hog
from skimage import io
im = io.imread('./timg.jpg',as_grey=True)
normalised_blocks, hog_image = hog(im, orientations=9, pixels_per_cell=(8, 8), cells_per_block=(8, 8), visualise=True)
io.imshow(hog_image)
传统模型
Support Vector Machine
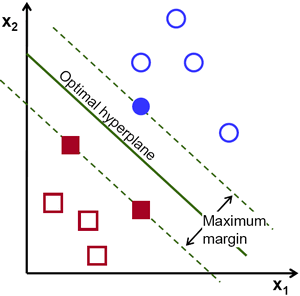
这张图足以说明支撑向量的含义,通过拉格朗日乘子法进行求解,一些原理性的介绍可以参看 https://docs.opencv.org/3.4/d1/d73/tutorial_introduction_to_svm.html
参考 https://www.pyimagesearch.com/2014/11/10/histogram-oriented-gradients-object-detection/ 中传统方法进行目标检测共有六个步骤,这里摘录一睹为快:
(1) 从训练样本中抽取正样本 (包含目标的图像块儿) P 个,并提取其 HOG 特征;
(2) 从训练样本中抽取负样本(不包含目标的图像块儿)N 个,并提取其HOG 特征,N » P;
(3) 在正负样本集上训练线性支撑向量机;
(4) 实施 hard-negative mining:对负样本训练集中的每个图像及其可能的尺度图像,用滑动窗口的技术在图像上滑动,对每个窗口的图像块儿提取HOG特征,并用应用训练过的SVM。如果分类器将负样本识别为目标,那么记录该特征矢量及其关联的假阳性图像块儿和对应的概率;
(5) 使用分类器输出的概率对这些假阳性的样本进行排序,并用这些假阳性的样本对分类器进行再次训练。可以迭代使用(4)和(5)多次,但是在实际中只使用一次就似乎是足够的了;
(6) 对训练好的模型在测试集上进行测试。在测试集的每张图像及其可能的尺度图像上,应用滑动窗口,提取HOG特征,用分类器分类,当输出结果的概率足够大,记录滑动窗口的位置。当扫描完图像,应用非极大值抑制方法剔除重复的检测。
最为典型的两个传统检测方法:
20200415