【计算机视觉】no-local means方法
大一统的高维高斯滤波表达式
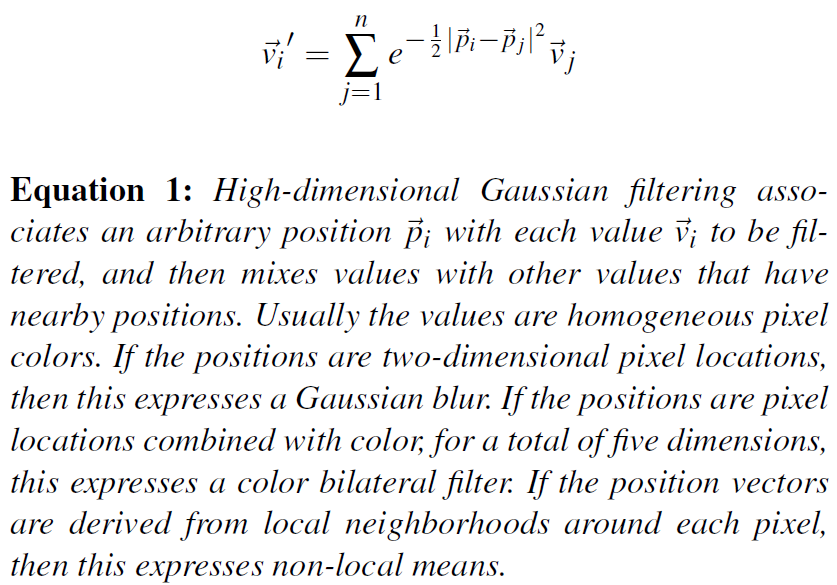
对任意的位置 pi 处的值 vi 进行滤波,与具有临近位置的其它值进行混合。通常这些值 vi 是均匀的像素颜色。
- 如果位置
pi是两维的像素位置,那么该公式表达的是高斯模糊Gaussian blur。 - 如果位置
pi是像素位置与颜色的联合,比如x,y,r,g,b共五维,那么该公式表达的是颜色双边滤波color bilateral filter。 - 如果位置矢量
pi是来自每个像素的局部邻域,那么该公式表达的是非局部均值no-local means。
本文主要探讨 no-local means 方法
no-local means
引入
Bennett and McMillan 在用双边滤波器的组合对视频进行去噪时,注意到像素位置 pi 可以通过包括临近像素的颜色或者灰度值可以得到有用的扩增,对加性白噪声是最理想的去噪器。(Buades et al.)
no-local means的含义
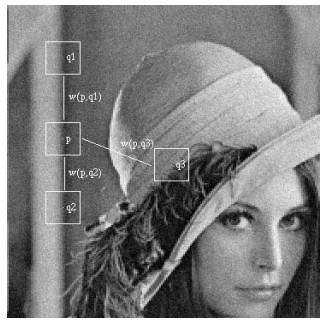
常规的高斯滤波,一个高斯核,以 pi 为中心,局部像素值的加权平均。这种都属于 local means。那么 no-local means 的含义指的是 位置 pi 被替换成像素位置的邻域每个像素,意思是用一个像素不足以表达像素之间的相似度,而用像素的邻域小patch就能更好地匹配相似模式。如下图所示:
实现的流程
一般考虑到算法的复杂度,需要指定 no-local means 的邻域小patch的半径,比如7x7大小。然后还要指定对一个像素计算加权平均值的位置,也就是搜索窗口半径,比如21x21。表达的意思在计算该像素滤波输出值时,需要在以该像素位置为中心的21x21的图像块儿中,计算每个7x7的小patch与中心patch的相似度,并进行加权平均。
加速实现
很显然,这样的计算速度不会很快。很多加速算法,比如:一些采用预定义的区域来限制搜索区域(Mahmoudi and Sapiro [MS05] preclassify regions of the image according to average intensity and gradient direction in order to restrict the search);结合积分图(Darbon et al. [DCC*08] compute integral images of certain error terms, as do Wang et al. [WGY0*6])。这些方法都搜限制于位置矢量来自矩形的图像patches,而不能泛化至 结构更少的去噪任务,比如 geometry denoising和photon density denoising。
论文参考
20200411
-
Previous
【计算机视觉】双边滤波 `bilateral filter` 方法 -
Next
【计算机视觉】Fast High-Dimensional Filtering Using the Permutohedral Lattice