【计算机视觉】图像分割之图割
max-flow 与 min-cut
min-cut
一个最简单的例子就是从原点 S (source) 到目标点 T (sink) 有三条路径,每条路径都有一个代价 c (cost),最小割的意思就是切断 原点 S (source) 到目标点 T (sink) 的通路,且保证所减掉的边的代价之和最小:
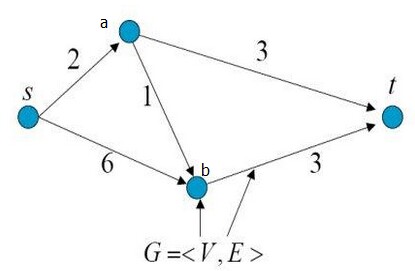
很明显s->a以及b->t这两个边砍断代价最小。正所谓min-cut
max-flow
S能流入T的最大流量,边想象成管道,权重表示流量,那么T点能够流入的最大流量是 2 + 3 = 5,而起到约束作用的边就是s->a以及b->t这两个edges。此所谓最大流。
可以看到,最大流和最小割结果一致,其实不奇怪,福特-富克森定理表明这两者是等价的。而一般最小割问题也会转化为最大流问题进行求解。
Graph-cut图割
Graph cuts是一种十分有用和流行的能量优化算法,在计算机视觉领域普遍应用于前背景分割(Image segmentation)、立体视觉(stereo vision)、抠图(Image matting)等。
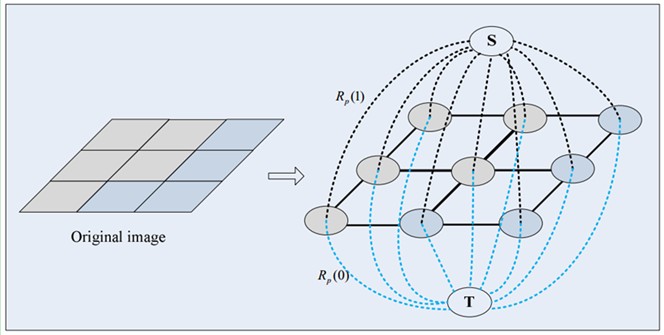
图像可以表示为一张无向图,G(V,E),V是顶点集合,E是边集合。在Graph Cut中这个图多了两个顶点,一个是源点S,一个是汇点T。每个像素顶点跟这两个顶点都有连接,构建为t-links的边。
t-links与n-links
一般前景、背景分各种,S表示前景目标,T表示背景,每个像素点与S/T相连的边为t-links,而像素之间只有四邻域的连接,叫做n-links。
Cuts
Cuts是一组边的集合,这些边的断开会使得S->T没有通路,也就是将每个像素只与S或T中的一个相连接,t-links断裂实现分类,实现前景和背景的分离,而对应n-links断裂则是空间上的边界断裂。
跟上面介绍的最小割一样,这样的Cuts对应的权重或者代价之和最小。
权值与代价 costs
如何确定这些costs呢?根据具体前景与背景的分割任务,可以想象,前景与背景是有一些外观差异的,最直接表现在像素值的差异性。那么t-links对应的代价可以是像素值与目标像素或者背景像素的相似度,相似度越大,对应的切割代价就应该也大。那么n-links对应的代价又该如何确定呢?邻域连接,属于同一目标的像素会有邻域相似性,而相似性比较差的区域往往是前景与背景的交界处。这种度量正好拿来作为n-links的权重。如果邻域内相连的两个像素像素值相近,那么断开该link的代价就应该高。
基于上面这样简单的逻辑,可以设计如下的代价函数:一元势函数+二元势函数
给定一个Cuts L,也就对应给定了每个像素的标签 L={l1, l2, ..., lp},li为0 背景和1 前景,此时对应图的能量为:
E(L) = a * R(L) + B(L)
R(L),区域项,对应为一元势函数,表示断开t-links的代价,B(L),边界项,对应为二元势函数,表示断开n-links的代价。a表示对应的重要因子,当a=0时表示只考虑断开n-links的代价。
区域项 R(L)
那么R(L)=∑Rp(lp), p ∈ P。Rp(lp)为像素p分配标签lp的代价,可以将像素p的灰度值与给定前景区域的灰度直方图进行比较来计算,即可得到属于lp的概率。一般取概率的负对数。Rp(lp=1) = -ln Pr(lp=1|Obj), 表示给定前景目标的情况下,像素p属于前景目标的概率取负对数。当像素p与前景目标相似,那么将其分成背景的代价就大,而分成前景的代价就小。同样,Rp(lp=0) = -ln Pr(lp=0|bkg)为将像素p分类为背景的代价。概率大,对应的代价就小,这里的代价也可称为图的能量。
边界项 B(L)

只考虑领域的n-links,对于任意属于领域的p,q,此时这两者之间如果同属一个标签,因为是领域,则没有任何代价,δ函数就是起到这个作用。如果不属于同一个标签,则需要计算对应的两个像素之间的相似度。可以分析,p和q像素值相等,对应的B<p,q>值会比较大,而被分为不同的标签则需要较大的代价。
Graph-cut 示例
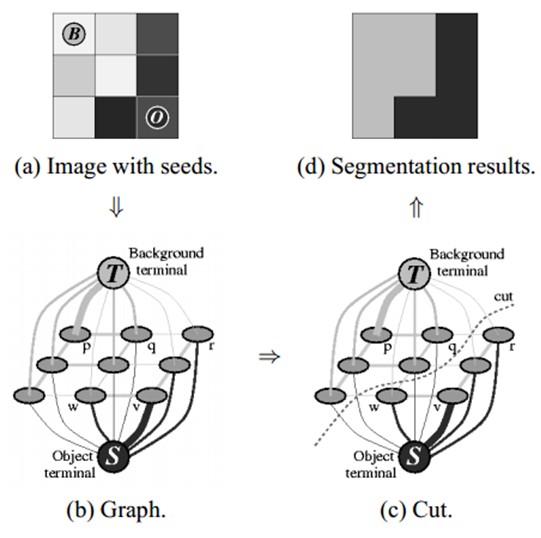
Graph cut的3x3图像分割示意图:我们取两个种子点(就是人为的指定分别属于目标和背景的两个像素点),然后我们建立一个图,图中边的粗细表示对应权值的大小,然后找到权值和最小的边的组合,也就是(c)中的cut,即完成了图像分割的功能。
具体实现,可以参考:Medpy graphcut maxflow
2020-04-07